
SKM2305NDR是一款高性能的面向车载导航领域的车载组合导航模块,模块包含高性能的同时支持GPS、北斗、GLONASS、Galileo、QZSS的卫星接收机信号、支持L1+L5双频定位、三轴陀螺仪、三轴加速度等;通过在线的自适应组合导航算法,SKM2305NDR提供实时高精度的车辆定位、测速和测姿信息,在GNSS系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,SKM2305NDR利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿。模块可以直接输出总里程数,方便客户进行里程计量。
接口信息描述:
SKM2305NDR可根据实际需求选择4PIN的SKM2305NDR-40MXT和6PIN的SKM2305NDR-40FXT

SKM2305NDR-40MXT接口描述
序号/NO. | 名称/Name | 输入/输出Input/Output | 描述/Describe | 备注/Remark |
Micro-Fit 3.0 连接头 | ||||
1 | RXD | I | UART Serial Data Input | RS232电平 |
2 | GND | G | Power Ground | Reference Ground |
3 | TXD | O | UART Serial Data Output | RS232电平 |
4 | VCC | P | Power Supply | VCC:3.5V~5.5V |
SKM2305NDR-40FXT接口描述
序号/NO. | 名称/Name | 输入/输出Input/Output | 描述/Describe | 备注/Remark |
MOLEX 连接头105308-1206 | ||||
1 | GND | G | Power Ground | Reference Ground |
2 | RXD | I | UART Serial Data Input To SKM2305 | RS232 |
3 | TXD | O | UART Serial Data Output From SKM2305 | RS232 |
4 | NC | Not Connect | ||
5 | PPS | O | Time Pulse Signal (Default 100ms) | |
6 | VCC | P | Power Supply | VCC:3.5V~5.5V |
技术方案
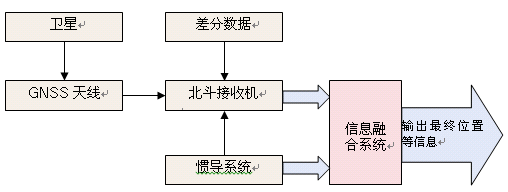
基于差分系统,获得RTCM2.3-3.3的差分数据,SKM2305NDR可实现差分定位,在空旷环境下可以实现亚米级的定位精度;
基于惯性导航的组合定位方式,实现在复杂环境下的车辆导航定位,从而可以实现在高架下,高楼林立,树木遮挡等环境下的公交车高精度导航定位。
模块无安装角度限制,自由安装,具备自适应功能
1、组合导航初始化
目前,GI-200惯性导航算法实现自适应安装算法,即用户可以任意安装模块,实现相同的组合导航效果。
具体而言:用户需要把SKM2305NDR和车体固定连接,静止上电,然后,车辆行驶起来,通过车辆的加速减速拐弯等车辆运动,SKM2305NDR识别出安装角度;总之,需要跑车一段时间,才可以获得安装角。
当获得安装角之后,SKM2305NDR马上进入组合导航状态,再经过大约1分钟左右车辆行驶,惯性导航训练成功,此时,可以进入隧道和车库等无卫星定位的区域。
具体初始化过程如下表所示:
阶段 | 组合导航初始化过程 | 系统状态 | 定位结果 |
1 | 上电后,静止5-10秒以上,完成导航系统的姿态初始化;由于SKM2305NDR具有自动识别车辆静止或动态的功能,如果车辆行驶过程中上电,在SKM2305NDR会等到车辆静止后完成功能。 | GPATT协议的State_Flag成为01 | 输出纯卫星定位结果 |
2 | 卫星定位成功,收到有效的卫星解析,并确保卫星定位达到一定精度(GPGGA协议Gps_Precision小于10),SKM2305NDR完成惯性导航位置初始化,GPATT状态位变为2。即卫星定位精度很差时,SKM2305NDR不对惯性导航位置进行初始化,而是输出卫星定位结果。 | GPATT协议的State_Flag成为02 | 输出纯卫星定位结果 |
3 | 尽量保持GI-200导航系统在空旷的地方行驶一定时间,这个过程中,SKM2305NDR进行安装角识别,此过程中,SKM2305NDR完全复制卫星定位结果。获得安装角之后,GPATT状态位为2。 | GPATT协议的State_Flag变成02 | 输出纯卫星定位结果 |
4 | 获得安装角之后,车辆行驶速度超过3米/秒,SKM2305NDR完成对惯性导航的速度和方向初始化,则GPATT状态位变为3。 | GPATT协议的State_Flag变成03 | 输出组合导航定位结果 |
5 | 继续保持GI-200导航系统在空旷的地方行驶,这个过程中,SKM2305NDR利用卫星定位数据对惯性导航进行训练,此次,GPGGA的InsTime每秒加1,通过大约1分钟,即InsTime大于60之后,SKM2305NDR基本实现组合导航系统的算法收敛,即完成对惯性导航元件误差的估计。 | GPATT协议的State_Flag成为03,GPGGA的InsTime每秒加1 | 输出组合导航定位结果 |
6 | SKM2305NDR完成组合导航算法收敛后,可以进入隧道或车库等无卫星定位环境进行定位。 | GPATT协议的State_Flag为03 | 输出纯惯性导航定位结果 |
7 | SKM2305NDR完成组合导航算法收敛后,可以进入高架下、高楼林立、小区等无卫星定位差的环境进行定位。 | GPATT协议的State_Flag为03 | 输出组合导航定位结果 |
8 | 通过长时间的车辆行驶,SKM2305NDR对安装角进行了多次求解并且处理之后,获得更加精确的安装角。GPATT状态位改为4。 | GPATT协议的State_Flag为04 | 输出组合导航定位结果 |
总结:
(1)组合导航系统初始化过程,建议车辆首先在无遮挡的环境下行驶大约几分钟,然后再进入有遮挡等复杂环境下,组合导航系统的定位效果才会好。
(2)其实,用户不需要特别关心SKM2305NDR的初始化过程,只需要在空旷环境下行驶大约几分钟,就实现了惯性导航初始化。
2、组合导航复位
为了确保SKM2305NDR可以长期高可靠性的提供稳定的车辆定位效果,与市场上常见的其他惯性导航模块一样,SKM2305NDR也具有自我失效检查功能,一旦确认当前的组合导航定位结果存在问题,SKM2305NDR马上进行组合导航复位,即从新进入组合导航初始化过程的第4阶段,即重新利用卫星导航结果对惯性导航进行位置、速度和方向的初始化。
当然,SKM2305NDR发生组合导航复位的概率非常低,但是,为了提高可靠性,确实需要具有组合导航复位的功能。
SKM2305NDR使用注意事项
SKM2305NDR作为一款高性能的车载组合导航G-mouse,在使用过程中,也需要用户注意一些使用事项,如表:
序号 | 准备工作 | 重要性 |
1 | 上电前,需要安装牢靠,安装时无具体安装角度要求,自适应; | 必须 |
2 | 上电前,固定连接车体和SKM2305NDR,模块无摇晃; | 必须 |
3 | 上电后,不能再移动SKM2305NDR; | 必须 |
4 | 车体移动前,确保用户GPS/BD系统输出规定的协议 | 必须 |
序号 | 组合导航初始化过程 | 重要性 |
1 | 上电后,静止5-10秒以上,完成导航系统的姿态初始化; | 必须 |
2 | 行驶2分钟后,在直线的道路上有加减速操作,以便识别安装角。 | 必须 |
3 | 行驶5-10分钟后进入复杂环境(如车库、隧道) | 必须 |
4 | 再次上电后,可以省略直线加减速识别安装角的步骤 |










 微信公众平台
微信公众平台
 业务咨询
业务咨询